投稿日:2025年05月20日
モーター選定は、機械やシステムの性能・安定性を決定する重要な工程です。入社して間もない若手の方の中には、「具体的にどうやって選べばいいの?」と悩んでいる人も多いのではないでしょうか。
本記事では、まず押さえておくべき「必要駆動トルク」「回転数」「トルク特性図」「許容慣性モーメント」という4つの基本ポイントに焦点を当て解説します。ぜひ最後までお付き合いください。
このコラムを書いた人

武田(もの猫):機械設計のプロフェッショナル
製造業で10年以上にわたり機械設計に従事し、機械設計技術者試験1級を保有。基本設計から評価、量産までの工程を経験しています。若手技術者の育成や設計リーダーとしての役割も担い、幅広い業務での知見をもとに、実務に役立つ情報を発信することを目指しています。
モーター選定の基本|まずはこの4つを押える
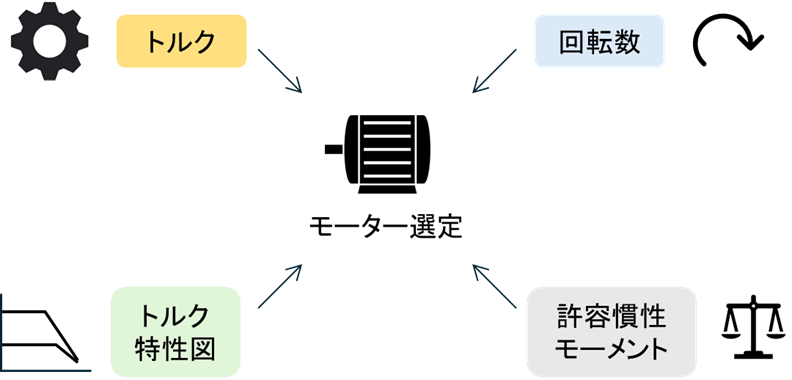
モーターを選ぶ際には、まず次の4つのポイントを理解しておきましょう。
- 必要駆動トルク
- 回転数
- モーターのトルク特性図
- 許容慣性モーメント
必要駆動トルク
モーター選定において最も重要なのが「必要なトルク」の計算です。
必要なトルクの基本は、「必要駆動トルク(N・m) = 外部負荷トルク + 加速トルク」です。負荷の質量や形状、駆動方式(ボールねじ、ベルト、直結など)、加減速の条件などを考慮して、適切にトルクを見積もりましょう。
- 外部負荷トルク : モーターが常時負荷を動かすために必須のトルク
- 加速トルク : モーターが加減速動作を行うときに、慣性抵抗に対して必要なトルク
回転数
次に、必要な動作速度域を把握することが重要です。モーターのトルク特性は回転数によって変化し、高回転域ではトルクが低下するモーターが一般的です。必要な回転数とトルクの両方を満たすモーターを選びましょう。
たとえば、ボールねじを駆動する場合、ねじリード(1回転あたりの直進距離)から必要な回転数が算出できます。
速度が100 mm/s、ボールねじリードが20 mmの場合、必要回転数 = 100 mm/s ÷ 20 mm = 5回転/s = 300 RPM(revolutions per minute:回転/分)となります。
モーターのトルク特性図
回転数とトルクの関係を確認できるのが トルク特性図です。モーターのカタログには、出力トルクの値や、回転数との関係を示すトルク特性図が掲載されています。
トルク特性図を用いて、必要なトルクが選定したモータースペック内に収まっているかを確認しましょう。
トルク特性図は、モーターの性能を視覚的に理解するための重要な資料です。下記では、主要なモーターの特徴と、それぞれのトルク特性のポイントを解説します。
各モーターの特性を理解し、用途や運転条件に合わせた選定を行うことが、システム全体のパフォーマンス向上と信頼性確保につながるでしょう。
サーボモーター
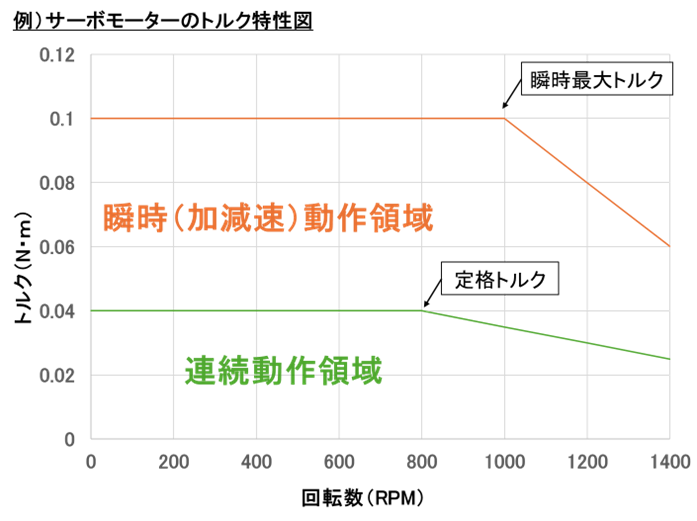
代表的なサーボモータートルク特性図の例
サーボモーターの特徴は、高精度なフィードバック制御が可能で、低速域から高速域まで安定したトルクを実現できる点です。また、定格トルクと瞬間最大トルクの差が大きく、一時的な急加速にも対応できます。
トルク特性としては、低速域では定格トルクを十分に発揮し、要求に応じた瞬間最大トルクを瞬時に発揮する領域が存在します。特に、動作時の精度が求められる場合には、この特徴が大きなメリットとなります。
DCモーター
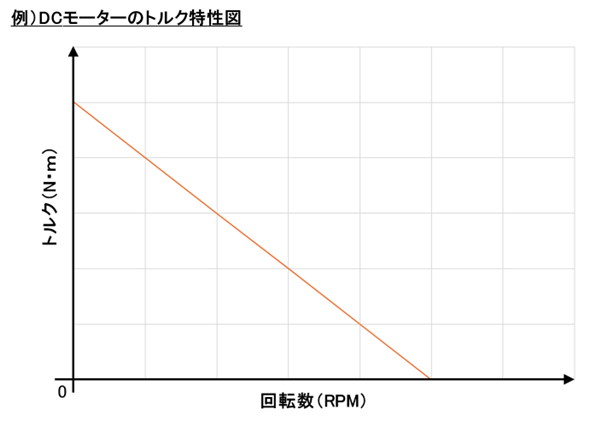
代表的なDCモータートルク特性図の例
DCモーターの特徴は、構造が比較的シンプルで、始動時に大きなトルクを発生しやすい点です。DCモーターにはブラシ式とブラシレス式がありますが、ブラシ式の場合、メンテナンスが必要な点を考慮する必要があります。
トルク特性としては、始動時(低速域)に高いトルクを持ち、回転数が上がるに連れて徐々にトルクが低下するパターンが一般的です。比較的定常運転時のトルクは安定しています。
ACモーター
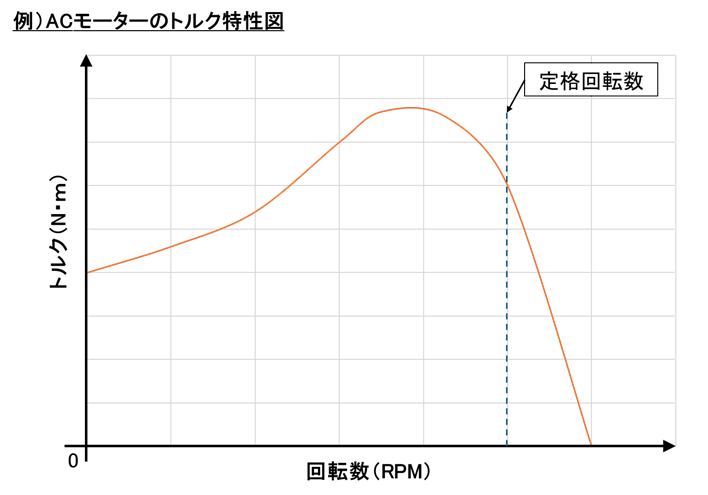
代表的なACモータートルク特性図の例
特徴は、交流誘導モーターは、定格運転時に高いエネルギー効率を誇る点です。一方、回転子と磁界間のスリップ現象により、高回転域では急激にトルクが低下します。
トルク特性としては、定格回転数より低い回転数でトルクがピークを迎え、その後の急激な低下が見られます。この特徴により、トルクが多少変化しても、回転数が安定します。
ステッピングモーター
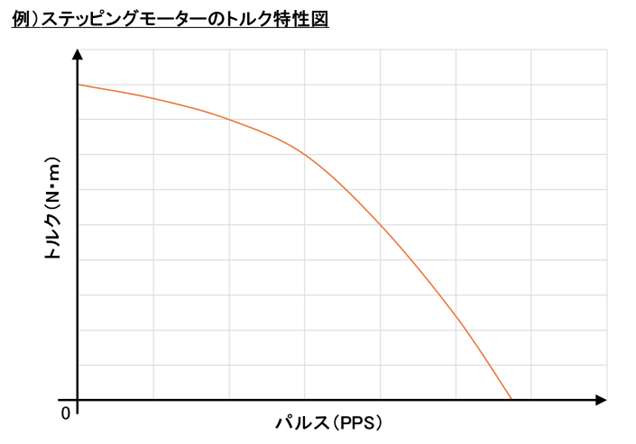
代表的なステッピングモータートルク特性図の例
ステッピングモーターの特徴は、位置決め精度が非常に高く、低速時に強い保持トルクを発揮する点です。細かなステップ制御が可能ですが、高速運転時にはトルクが急落するため用途が限定されます。また、振動や共振現象が生じやすく、これらの対策が必要になる場合もあります。
トルク特性としては、低速領域では非常に高いトルクを持ちますが、回転数が上がるにつれて急激にトルクが減少します。
許容慣性モーメント
モーターの選定において忘れがちなのが、許容慣性モーメントです。モーターの慣性モーメントと負荷側の慣性モーメントの比率が許容範囲である必要があります。負荷側の慣性が大きすぎると、制御が不安定になり振動やオーバーシュートの原因となるため注意が必要です。
設計時には、メーカーが提供する「許容慣性モーメント」や「負荷慣性モーメント比」を参照し、チェックを忘れないようにしましょう。
モーター選定の基本の流れ
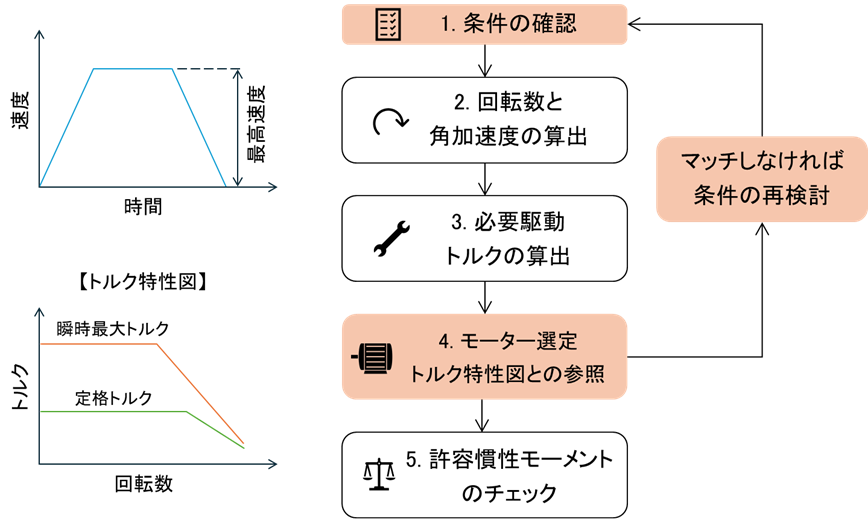
基本のポイントが理解できたら、最後に実際のモーター選定の流れを確認しましょう。上図は、基本的なモーター選定の流れです。それぞれ確認していきましょう。
1. 条件の確認
システムの使用目的、動作条件(移動距離、移動時間、最高速度など)、設置環境(温度、振動など)を整理し、必要な条件を明確にします。
2. 回転数の算出
使用する駆動装置(例:ボールねじ)の仕様から、必要な回転数を計算します。
3. トルクの算出
計算により外部負荷トルクおよび加速トルクを求め、これらの合計値をモーターに要求される「必要駆動トルク」として算出します。
4. カタログ(トルク特性)との照合
計算結果をもとに、各モーターのトルク特性図を確認します。定格トルク、ピークトルク、そして各モーターの特性を比較検討し、該当するモーターを選定します。
5. 許容慣性モーメントのチェック
モーターの許容慣性モーメントと負荷側の慣性モーメントのバランスを確認し、安定運転が可能な設計となっているかを評価します。必要に応じて、負荷側の構成変更や減速機の見直しを検討しましょう。
サーボモーターの詳しい選定手順は、以下のページで詳しく解説しています。

最後に
実際の設計では、モーターそのものの性能だけではなく、制御系や周辺機器、設置スペース、コスト、納期など、あらゆる要素を総合的に考慮する必要があります。
しかし、今回ご紹介した「必要駆動トルク」「回転数」「トルク特性」「許容慣性モーメント」の4つの基本ポイントを正しく押さえることが、初心者の方でも確実なモーター選定を実現するための出発点です。